Моделирование выходного напряжения MAP-сенсора
MAP-сенсор преобразует абсолютное давление воздуха во впускном коллекторе в напряжение. Это напряжение можно преобразовать в понятные значения давления с помощью линейных формул. Ниже представлены формулы, используемые для расчетов, а также данные для сравнения.
Формулы
- Общая линейная формула:y=m⋅x+by = m \cdot x + by=m⋅x+bгде:
- yyy — напряжение (в вольтах).
- xxx — давление (в дюймах ртутного столба, inHg).
- mmm — наклон графика (изменение напряжения на единицу давления).
- bbb — смещение (напряжение при 0 inHg).
- Формула из Helm Manual:
- y=−0.1⋅x+2.85
- Обратная формула для расчета давления: x=−(y-2.85)/(-0.1)
- Формула из Alldata:
- y=−0.1⋅x+3.0
- Обратная формула: x=(y-3.0)/(-0.1)
y = mx + b
y = mx + 2.85v
y = (-.1)x + 2.85v
(-.1)x = y — 2.85
x = (y — 2.85v) / (-.1)
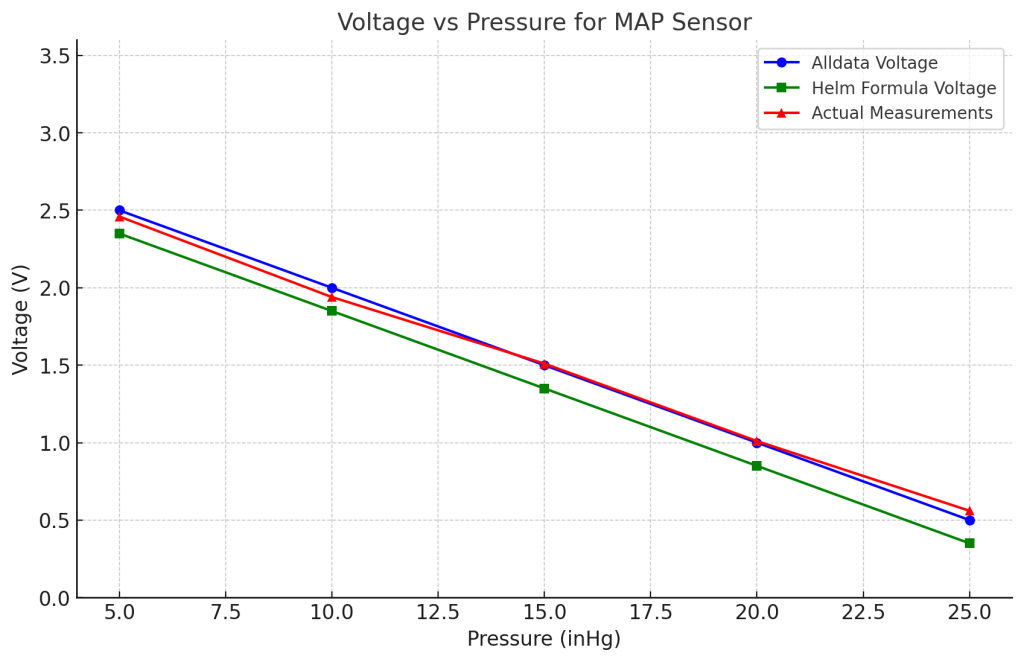
05 in Hg| Alldata: 2.5 | 2.35 Helm-based formula | my actual: 2.460 10 in Hg| Alldata: 2.0 | 1.85 Helm-based formula | my actual: 1.938 15 in Hg| Alldata: 1.5 | 1.35 Helm-based formula | my actual: 1.509 20 in Hg| Alldata: 1.0 | 0.85 Helm-based formula | my actual: 1.012 25 in Hg| Alldata: 0.5 | 0.35 Helm-based formula | my actual: 0.558
Сравнение данных
| Давление (inHg) | Alldata (В) | Helm Formula (В) | Фактические измерения (В) |
|---|---|---|---|
| 5 | 2.50 | 2.35 | 2.46 |
| 10 | 2.00 | 1.85 | 1.94 |
| 15 | 1.50 | 1.35 | 1.51 |
| 20 | 1.00 | 0.85 | 1.01 |
| 25 | 0.50 | 0.35 | 0.56 |
Выводы
- Формулы из Helm Manual и Alldata дают близкие, но немного отличающиеся результаты.
- Фактические измерения зависят от состояния сенсора и его калибровки.
- Для точного моделирования рекомендуем использовать фактические измерения вашего сенсора в сочетании с одной из формул.